
Passive bearings
Small, simple, cheap: Passive bearings seem like the perfect solution. But the devil is in the details.
Passive magnetic bearings (PMB) achieve contact-free levitation of an object by permanent magnetic forces, either by two magnets attracting or repulsing each other. Depending on the configuration, stabilization in radial, axial and tilt direction are possible.
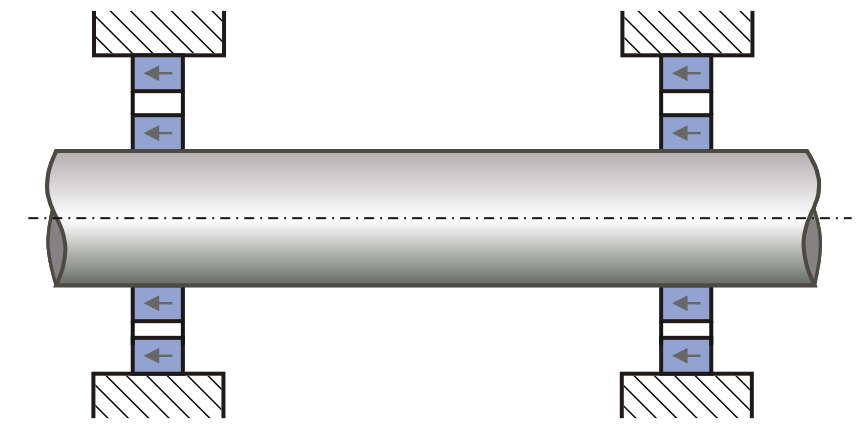
It is, however, not possible, to stabilized all degrees of freedom of a body by passive magnetic levitation, alone. This has been shown by Braunbek who interpreted the prior findings of Earnshaw on the stability conditions in force fields for magnetic levitation (“Earnshaw’s theorem“). Diamagnetic materials such as superconductors are explicitly not considered in this theorem. A very simple PMB design consists of permanent magnetic rings on both, the rotating shaft and the stator, which stabilize the radial movement by repulsive forces (see figure).
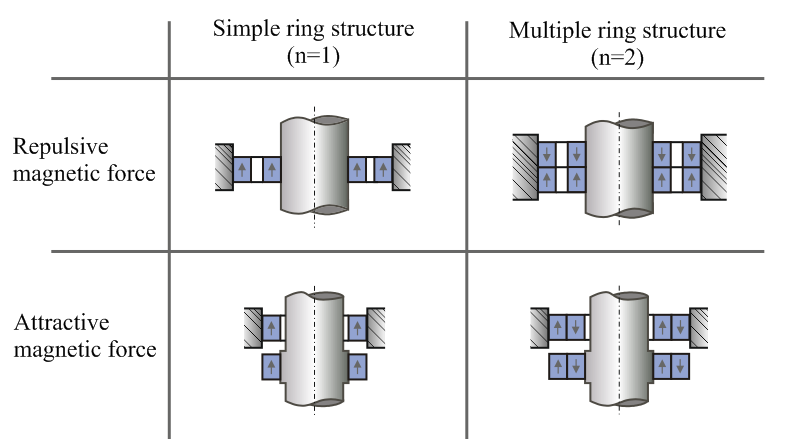
Different configurations of attractive or repulsive permanent magnets are possible in classic PMBs. The table shows common arrangements with one or two ring magnets. Stacking the magnets or magnet pairs can be used to increase the bearing forces and also the stiffness.
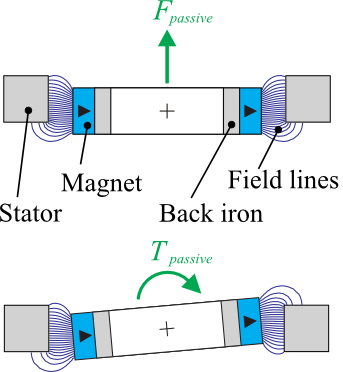
Using disk-shaped rotors allows stabilizing more than one degree of freedom with only one permanent magnet. In the example shown here, both the axial and tilting motion of the inner rotor are stabilized passively.
PMBs are cheap, small, and mechanically simple, since they require no active components such as actuators, coils or power electronics. Their stiffness values are determined by the configuration and the material properties. Their biggest disadvantage is the lack of damping: The PMB itself provides close to zero damping which is why, typically, additional damping measures are added. The options range from visco-elastic, to electrodynamic or other mechanic damping elements.
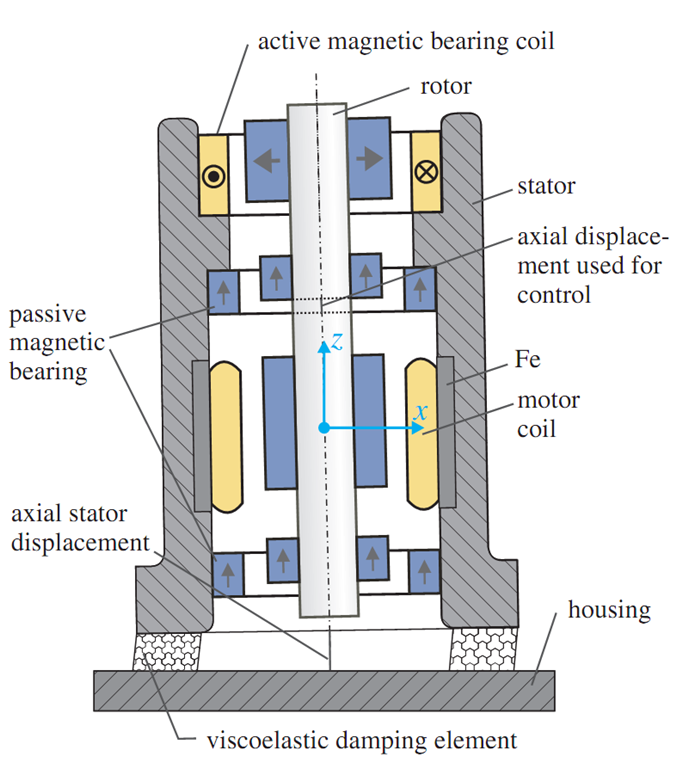
The figure of a magnetically levitated rotor shows a magnetic bearing concept with relatively low constructive complexity. The radial and tilt stabilization are achieved by two passive magnetic bearings. The active element is used to control the axial rotor position, which is unstable due to Earnshaw’s Theorem.
Due to the lack of damping of permanent magnetic bearings, additional measures are required to gain sufficient stability against disturbances and to successfully pass resonance frequencies during run-up. For applications with a limited temperature range, one possibility is to use visco-elastic stator supports to dampen the rotor vibrations. Alternatively, eddy current dampers can be used to constrain rotor vibrations. These damping measures demand considerable modelling effort but strongly improve the system performance: The vibrations caused by unbalance, magnetic tolerances or external excitations can be suppressed.