
Bearingless motors
Decreased mechanical complexity, increased control complexity: Bearingless drives.
A bearingless motor is a special form of an actively magnetically levitated motor.
The genesis of the term can be attributed to the term “brushless motor”, where the brushes in DC motors are replaced and their functionality is integrated by field oriented control. The same is true for a “bearingless motor”, where the mechanical bearings are replaced and their functionality is integrated by suspension force control. The same analogy can be drawn to the word “sensorless”, where the physical motor angle sensors are replaced and their functionality is integrated by signal processing of the motor’s winding currents.
As with AMBs, rotor position sensors and power electronics are required to operate a bearingless drive.
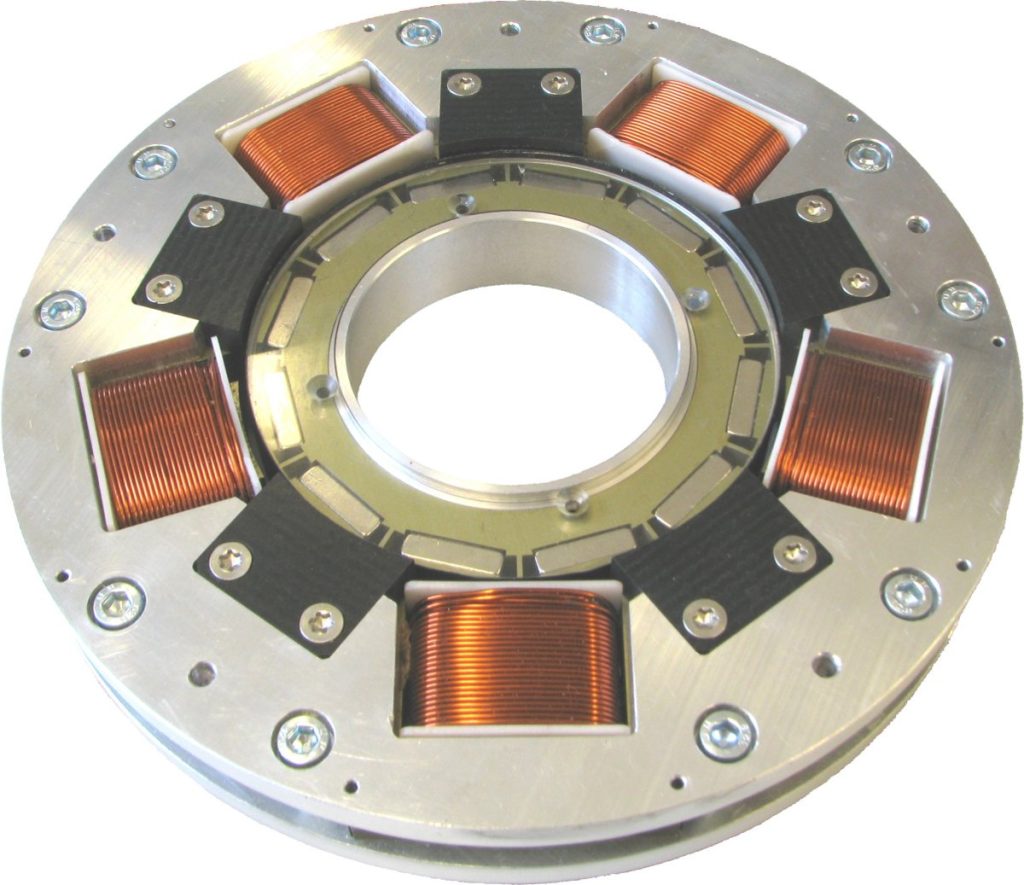
The mechanical integration of electrical motor and magnetic bearing is expressed by using at least the same iron core. Additionally, it is possible to find configurations where also the same set of coils may be used for the motor currents and bearing currents. This allows a simplification of the mechanical system but increases the control complexity. As shown in the schematic, the currents are superposed before being set as new target values for the current controller.
