Active Bearings
The most widely used magnetic bearing topology.
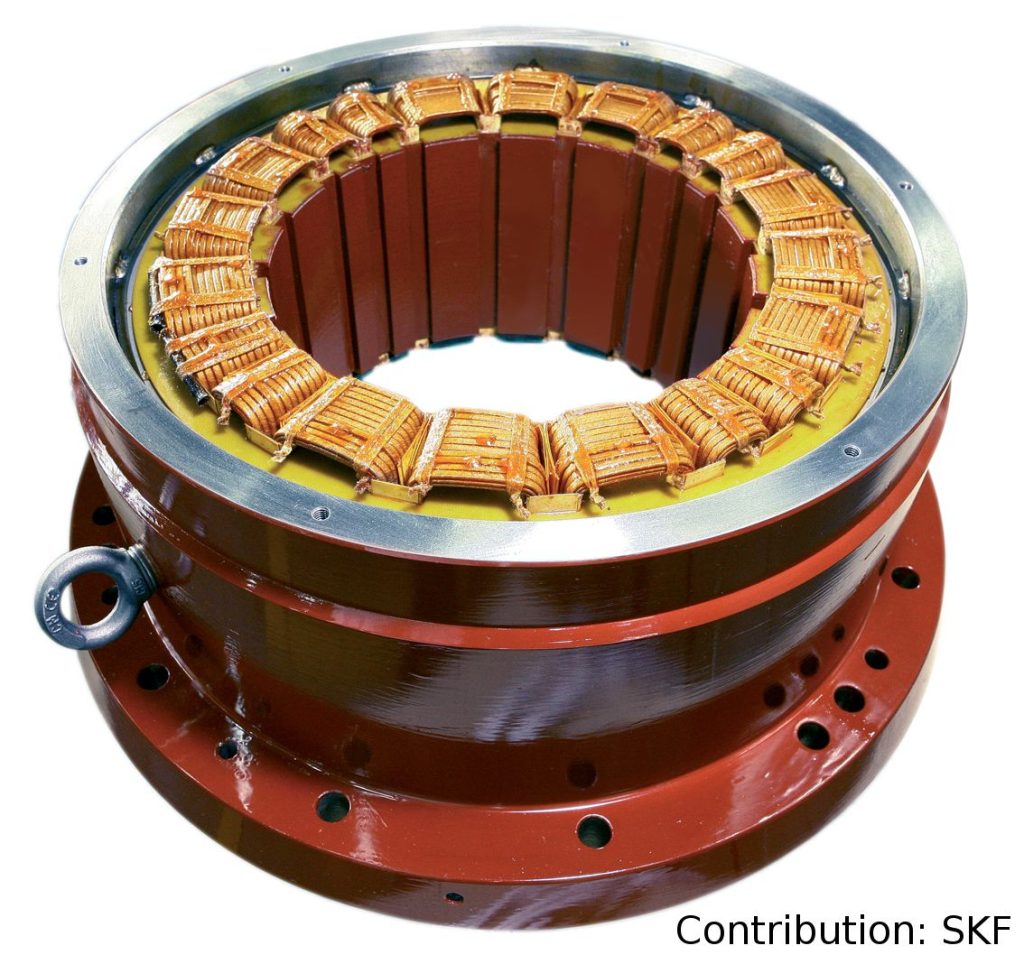
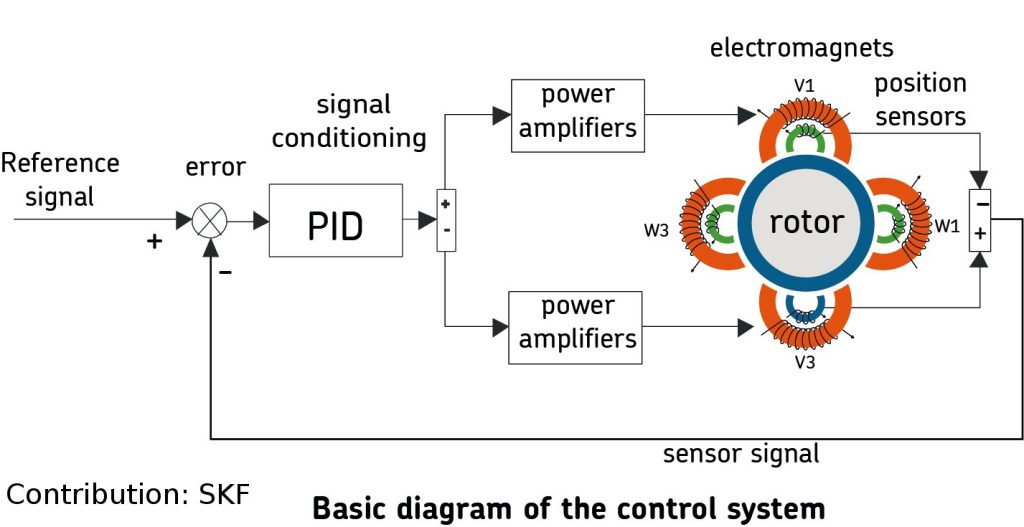
The dominant magnetic bearings in todays applications are active magnetic bearings (AMB). They use electromagnetic actuators to control the position of the rotor or levitated object in general. Any degree of freedom can be stabilized using an AMB and in contrast to PMBs, full and stable levitation is possible using only AMBs. The bearings are separate mechanical units with an iron core, bearing windings and attached sensors for determining the rotor position. Radial bearings as in the photo by SKF and axial bearings are used to completely stabilize the rotor.
In an AMB, the flux density difference between two opposing areas of the air gap determines the resulting force on the rotor. These forces depend quadratically on the flux density. Permanent magnets can be used to create bias flux, increasing the absolute flux density values. This bias flux shifts the operation point to higher flux values and increases the achievable bearing forces.
Permanent magnets in AMBs can also be used to compensate static loads, e.g. due to a gravity related shift of the rotor. Both measures reduce the necessary bearing power in the AMB. For further explanations to active magnetic bearings and their components, browse through the video and animation sections at Waukesha Bearings Corporation and SKF/S2M or take a look at the video below.
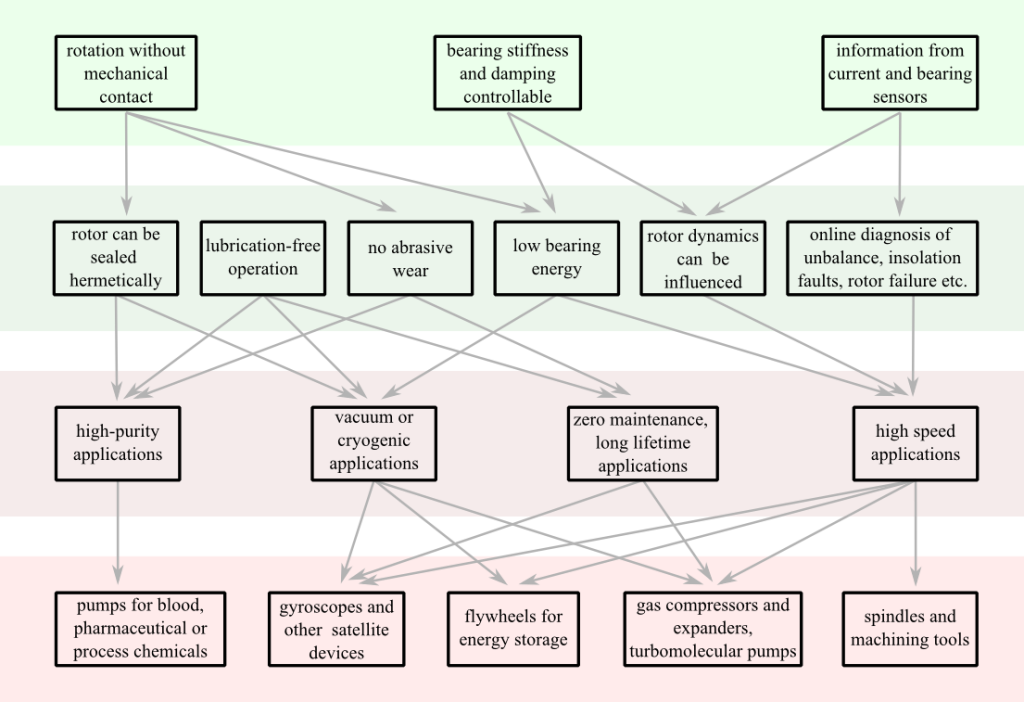
The vast majority of industrial applications using magnetic levitation rely on active bearings. The chart below illustrates the special characteristics of AMBs and their application scope. Even though passive magnetic bearings also provide many of the listed aspects, the full scope can only be provided by actively controlled bearings.